PolyU EIE3105 / EIE3106 - Note (Robot Car) - Integrated Project 2024 ( Jan to Apr 2024 ) PolyU EIE3105 / EIE3106 Info (EEE) 2023/2024 S2 - Integrated Project - Some Note & Info * ( 30 Jan 2024 ) (Click the photo to enlarge it) ----- ----- * Important Note * ----- ----- 1) Please note that each robot car is with a unique number assigned. Please do not exchange the car with your classmates, without approval. 2) Please note that the electric current or the power output of the I/O (Output pin) of microcontroller unit (MCU) STM32F103 is limited. Over electric-current driving will damage the circuit and the I/O pins of the MCU. So please make sure to have resistors to limit or protect the I/O pins of the MCU ("+" pin, driven by the output of MCU). (from https://www.eleccircuit.com/current-limiting-resistor/) Some students connect the LEDs and the output pin of the MCU, to drive the LEDs without any resistors to limit the electr...
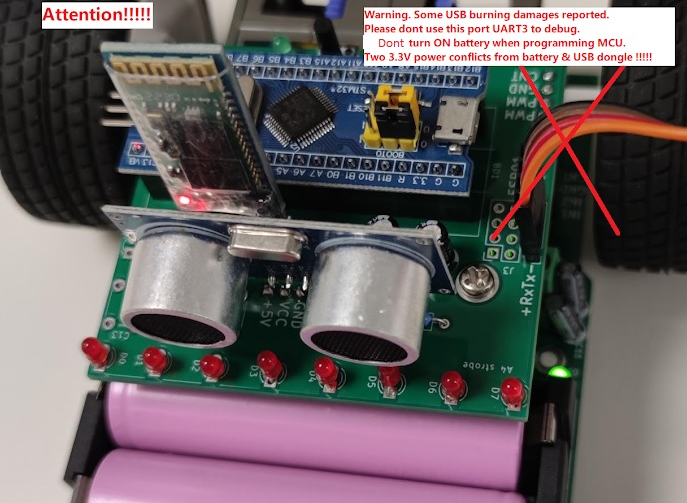
PolyU EIE3105 / EIE3106 Real PCB Photos 2022/2023 S1 to S2 - Integrated Project - Important Note * ( 15 Mar 2023 ) ----- ----- * Important Note * ----- ----- Some students reported failure on MCU or USB port burnt in short circuits (pins among 3.3V and GND). Possible damage causes: 1) The capacitor of C2 on the Blue-Pill MCU adaptor board is too small. It should be 100 uF or larger (recommended to use 220 uF, 10V) 2) Short circuit occured because of bad soldering or wrong connections. Please check your regulator outputs Vcc. It should be 3.3 V. Is it 3.3 V? Many students reported that the Vcc is 6V to 7V from the 3.3V regulator because it has been burnt due to short circuit. Please don't keep asking for new blue pill MCU board if you haven't checked the Vcc voltage!!! We have purchased many pieces of new AMS1117-3.3V. 3) The two 3.3V power were turned ON with: a) Battery power is turned ON to have a regulator to provide 3.3V AND b) USB port is connected to USB dongle to gene...
Component Order in Soldering 1) right angle header 2) 3-pin headers 3) 17-pin headers (fixture required) MCU Pinouts The on-board LED is connected to PB12. Pull it LOW to turn it on . It can be programmed either through the 4-pin header or through UART1. To program through UART1, set the jumpers to SERIAL PROGRAMMING before powering up. Normally the jumpers should be set in NORMAL MAIN FLASH. Schematic


留言
張貼留言