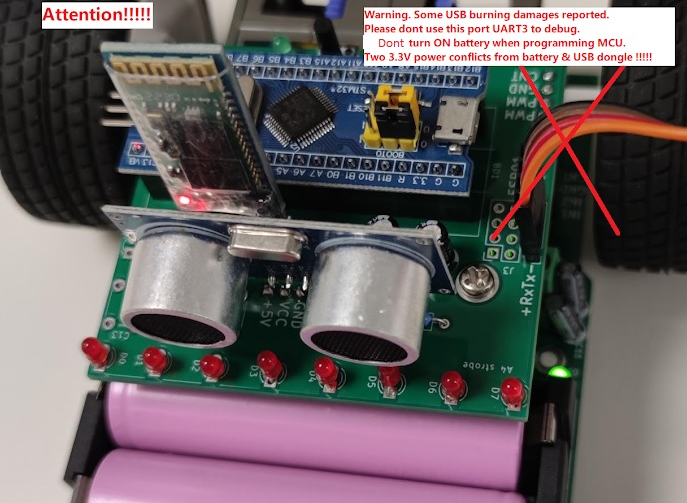
Control Adaptor Board (Old version 2020)

Construction
Pinout

Example Program
Please visit The Robot Car for example program.MCU Pin Assignment
| Pin | Function | Remark | Configuration|Mode |
| A0 | GPIO | LED | 0010=2 (2MHz) |
| A1 | TIM2_CH2 | counter right | 0100=4 (default) |
| A2 | TX2 | HC06 | 1010=a (AFPP) |
| A3 | RX2 | HC06 | 0100=4 |
| A5 | SCK1 | path sensor | 1010=a |
| A6 | MISO1 | path sensor | 0100=4 |
| A7 | MOSI1 | path sensor | 1010=a |
| A8 | TIM1_CH1 | motor left | 1010=a |
| A9 | TIM1_CH2 | motor right | 1010=a |
| A10 | TIM1_CH3 | HC-SR04, echo | 0100=4 |
| A12 | GPIO | button | 0100=4 |
| B0 | ADC12_IN8 | battery | 0000=0 (analog) |
| B6 | GPIO | LED | 0010=2 |
| B7 | TIM4_CH2 | counter left | 0100=4 |
| B10 | TX3 | uart3 | 1010=a |
| B11 | RX3 | uart3 | 0100=4 |
| B12 | GPIO | LED | 0010=2 |
| B13 | TIM1_CH1N | motor left | 1010=a |
| B14 | TIM1_CH2N | motor right | 1010=a |
| B15 | TIM1_CH3N | HC-SR04, trig | 1010=a |
Port Configuration Registers Setting
//
IOA = a a a ; i 7 i
IOA = a aa; i 15 i
IO = ;
IO = aaa a ;
GP ->CRL 0x 4 44 42 //p n ~ p n0
GP ->CRH 0x4444 4 //p n ~ p n8
GP B->CRL 0x42444440
GP B->CRH 0x 24 44
Timer 1
| UP_IRQ | isr | household timer |
| CH1+CH1N | pwm | left motor |
| CH2+CH2N | pwm | right motor |
| CH3 | capture | ultrasonic echo |
| CH3N | pwm | ultrasonic trigger |
Configuration Registers Setting
//
I 1 IE = I IE UIE; I 1 o e o
I 1 1 = ; 1 e oa
I 1 = 3; 1 = 7 3 1
I 1 A = 999; e io = 5
I 1 = I OE;
I E a eI I 1 U I ;
I 1 1 = I 1 E ; a i e
T M ->D R T M_D R_ //T M v rfl w
T M ->CCMR 0x6868 //CH2, CH : PWM pr l d
T M ->PSC // 8 MHz 2/( + )
T M -> RR 44 //p r d 2. ms
T M ->BDTR T M_BDTR_M
NV C_ n bl RQ(T M _ P_ RQn)
T M ->CR T M_CR _C N //st rt t m r
Other Initializations
//
S RT2->BRR 0 // 600
S RT ->BRR // 200
S RT2->CR S RT ->CR
S RT_CR _T | S RT_CR _R
SP ->CR2 SP _CR2_RXN
SP ->CR
SP _CR _CP L | SP _CR _MSTR |
SP _CR _BR | SP _CR _SSM |
SP _CR _SS
DC ->SMPR2 0x0 000000 //SMP8 (2 . cycl s)
DC ->SQR 8 //ch8
NV C_ n bl RQ( S RT2_ RQn)
NV C_ n bl RQ( S RT _ RQn)
NV C_ n bl RQ(SP _ RQn)
T M2->CR T M4->CR T M_CR _C N
S RT2->CR | S RT_CR _
S RT ->CR | S RT_CR _
SP ->CR | SP _CR _SP
U A = 375 ; 9
U A 3 = 313; 115
U A 1 = U A 3 1 =
U A 1 E U A 1 E;
I1 = I EIE;
I1 1 =
I 1 O I 1
I 1 I 1
I 1 I;
A 1 = 7 ; =111 39 5 e
A 1 3 = ;
I E a eI U A I ;
I E a eI U A 3 I ;
I E a eI I1 I ;
I 1 = I 1 = I 1 E ;
U A 1 = U A 1 UE;
U A 3 1 = U A 1 UE;
I1 1 = I 1 E;
Enable Peripheral Clocks
//
A E =
A E I1E
A E I 1E
A E A 1E
A E IO E
A E IO AE ;
A 1E =
A 1E U A 3E
A 1E U A E
A 1E I E
A 1E I E ;
RCC-> PB2 NR
RCC_ PB2 NR_SP N |
RCC_ PB2 NR_T M N |
RCC_ PB2 NR_ DC N |
RCC_ PB2 NR_ PB N |
RCC_ PB2 NR_ P N
RCC-> PB NR
RCC_ PB NR_ S RT N |
RCC_ PB NR_ S RT2 N |
RCC_ PB NR_T M4 N |
RCC_ PB NR_T M2 N


留言
張貼留言